Soft Robotics May Be the Future of Artificial Companions
Shadows could be the key to more responsive androids.

A research team at New York’s Cornell University developed a novel approach to equip robots with a sense of touch. This technology may provide the next generation of artificial companions with a way to interact with their owners far more realistically.
The growing popularity of soft robotics
Cost has been the least recognized of all the struggles that scientists have so far had to face when trying to provide robots with a way to physically detect human beings. In the past, haptic technology has typically required a considerable array of expensive tactile sensors.
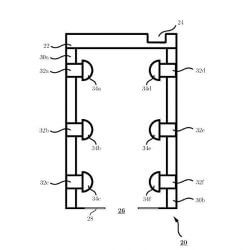
A potential way to sidestep this problem lies with soft robotics, where a system of air or liquid-filled inflatable bladders takes the place of the usual servomechanism, interior skeleton, and heavy outer covering.
Some people believe that this technology is the future of sexual robotics. Soft technology has a lot going for it when it comes to making realistic artificial companions or sextoys, because it replaces a hard body with a pliant one.
Depending on the design, soft robots can also be semi-transparent: a fact that got Guy Hoffman, the Mills Family Faculty Fellow and an associate professor in the Sibley School of Mechanical and Aerospace Engineering, and his team at Cornell’s Human-Robot Collaboration and Companionship Lab thinking.
Using shadows and soft robotics to predict touch
The Cornell team came up with the idea to use cameras embedded in their soft robot prototype to detect shadows. This would allow the robots to predict when they were about to be touched.
Speaking to The Cornell Chronicle, Hoffman explained that a lot of work remains. For example, the technology needs a clear line-of-sight between the interior cameras and the inner surface of the robot’s skin. However, he expressed hope that this unique take on the problem of haptic technology could inspire others to think outside the haptic box.
“These constraints could actually spark a new approach to social robot design that would support a visual touch sensor like the one we proposed,” he said.
Hoffman also outlined where he’d like to take the experiment next, “In the future, we would like to experiment with using optical devices such as lenses and mirrors to enable additional form factors.”
Come on, give us a hug

Another benefit to using soft robotics for artificial companions: they would be extremely huggable.
After all, no matter how well-engineered and manufactured, sexbots and the like have the same, universal hurdle to overcome. Although they may look a lot like us, they don’t feel quite the same.
This uncomfortable artificiality is mostly due to how robots are constructed. With all those cogs, gears, and a reinforcing framework, you’re more than likely to have the impression of hugging a steel skeleton thinly wrapped in a layer of artificial skin.
There are sexdolls that more closely approximate human beings, but they do so at the cost of not being unable to move very much.
Soft robotics, along with the technology that allows robots to move more fluidly, would be far more pleasant to embrace.
Early steps, ample opportunities
Hoffman is not alone in his attempt to re-think haptic technology for robots. It often feels like exciting new developments in the field are announced every few weeks.
As with any technology, these are the first, tentative, baby steps. Even if any of them turn out to be a significant stride forward, there’s a high probability that they would be too costly to pursue commercially.
But every technology that eventually fails or is too expensive is still progress. Before you know it, we may have artificial companions and lovers that will not only see with their skin, but will be gloriously huggable, as well.
Image sources: UC San Diego Jacobs School of Engineering, Narciso Bianco